Proseguiamo il nostro viaggio alla scoperta dello “Spazio Europeo”, focalizzandoci in questa tappa sulla seconda missione del programma ExoMars.
Immagine artistica del rover Rosalind Franklin della missione ExoMars 2028 (per cortesia dell’ESA)
La parola “Exo” in “ExoMars” si riferisce allo studio dell’Esobiologia, la disciplina che si occupa della ricerca di possibili forme di vita al di fuori della Terra, a volte chiamata anche Astrobiologia: una disciplina che ha affascinato l’umanità per secoli.
Il pianeta Marte, in particolare, è stato sempre al centro di molte speculazioni e studi esobiologici. Nel XIX secolo, l’astronomo Giovanni Schiaparelli evidenziò, con le sue osservazioni, l’esistenza di canali, che vennero interpretati erroneamente come canali artificiali costruiti da una civiltà avanzata che abitava il pianeta.
Purtroppo, le indagini condotte dalle missioni spaziali a Marte, come quelle delle sonde Mariner e Viking (della NASA), contribuirono a dissipare questo mito, rivelando un pianeta ben lontano dall’idea romantica di un mondo abitato. Infatti, le immagini e i dati ad oggi raccolti hanno mostrato Marte essere un pianeta arido, freddo e inospitale, privo delle condizioni necessarie per ospitare una forma di vita come la conosciamo.
Nonostante ciò, la curiosità scientifica non si è affievolita, poiché circa 4 o 5 miliardi di anni fa, sul Pianeta Rosso, ci potrebbero essere state condizioni simili alla Terra che avrebbero consentito la formazione di vita primordiale rimasta poi confinata nel sottosuolo protetta dalle radiazioni cosmiche.
Pertanto, stabilire se la vita esista o sia mai esistita su Marte rappresenta uno degli obiettivi scientifici di grande interesse del nostro tempo: ciò è fondamentale per programmare future missioni umane verso il Pianeta Rosso. Il programma ExoMars dell’ESA ha affrontato tale questione con due missioni: la prima lanciata a marzo 2016 (oggetto dell’articolo precedente), ed una seconda, tuttora in fase di realizzazione.
Il lancio della seconda missione era, originariamente, programmato a settembre 2022 con il razzo Proton-M, fornito da Roscosmos (l’Agenzia Spaziale Russa), dal cosmodromo di Bajkonur. Purtroppo, il lancio è stato sospeso, a marzo 2022, dal Consiglio dell’ESA a causa dell’invasione Russa dell’Ucraina. Successivamente, a luglio 2022, il Consiglio dell’ESA ha annullato definitivamente la cooperazione tra ESA e Roscosmos.
Nel Consiglio a livello ministeriale di novembre 2022, gli Stati membri dell’ESA si sono impegnati a finanziare una nuova missione, denominata ExoMars Rosalind Franklin rover, che include un nuovo lander europeo per portare il rover Rosalind Franklin sulla superficie di Marte.
Il rover Rosalind, una volta sulla superficie del pianeta, avrà il compito di esplorare le antiche formazioni geologiche e i resti di possibili oceani marziani, offrendo un’opportunità unica per viaggiare nel tempo e studiarne la sua evoluzione. Attraverso l’analisi di rocce sulla superficie e nel sottosuolo, il rover cercherà segni di vita passata, come microrganismi o biomolecole, e valuterà le condizioni che potrebbero aver permesso l’esistenza di forme di vita.
Il rover Rosalind ha, infatti, una capacità di perforazione del sottosuolo unica ed un laboratorio scientifico a bordo senza pari rispetto a qualsiasi altra missione in fase di sviluppo.
Grazie al suo trapano (Drill) dotato di una punta di diamante di produzione italiana, capace di prelevare campioni di terreno con un diametro di 1 cm e una lunghezza di 3 cm, il rover esplorerà il sottosuolo marziano fino a circa 2 metri di profondità. L’obiettivo è raccogliere campioni di suolo rimasti schermati dalle radiazioni cosmiche superficiali. Questi materiali saranno successivamente analizzati direttamente sul posto dagli avanzati strumenti scientifici del Pasteur Payload.
In base alle misure effettuate autonomamente dal Pasteur Payload, il rover Rosalind potrà fornire informazioni dettagliate sulla composizione chimica dei materiali che costituiscono il terreno di Marte e sulle sue condizioni ambientali, aiutando gli scienziati a ricostruire la storia di questo affascinante pianeta. Inoltre, i risultati così ottenuti renderanno possibile la realizzazione della missione Mars Sample Return e, successivamente, la programmazione di missioni future con astronauti.
Va anche sottolineata l’importanza dell’aspetto tecnologico della missione, la cui implementazione è fondamentale per garantire ulteriore autonomia e leadership europea nell’esplorazione robotica di Marte. Infatti, la missione Rosalind Franklin rover servirà anche a dimostrare le tecnologie chiave che l’Europa deve padroneggiare per le future missioni di esplorazione planetaria. Ciò include la capacità di atterrare in sicurezza su un pianeta, di muoversi autonomamente sulla superficie e di eseguire automaticamente perforazioni, elaborazione e analisi dei campioni. Il rover utilizzerà nuove tecniche innovative, tra cui il “wheel-walking”, per muoversi su terreni difficili, nonché software per la navigazione autonoma di ultima generazione.
Originariamente lo spacecraft della seconda missione ExoMars era composto
- dal modulo di trasporto (il Carrier Module – CM) e dal rover, entrambi forniti dall’ESA;
- dal modulo di discesa (il Descent Module – DM) e dal lanciatore Proton-M entrambi messi a disposizione da Roscosmos.
In aprile 2022, data dell’interruzione della cooperazione ESA-Roscosmos, l’hardware ed il software di volo dello spacecraft erano già stati realizzati, verificati e pronti per il trasferimento alla base di lancio di Bajkonur.
Le foto che seguono sono relative alle fasi di integrazione dell’hardware di volo del rover, DM e CM prima della “divorzio” con Roscosmos .
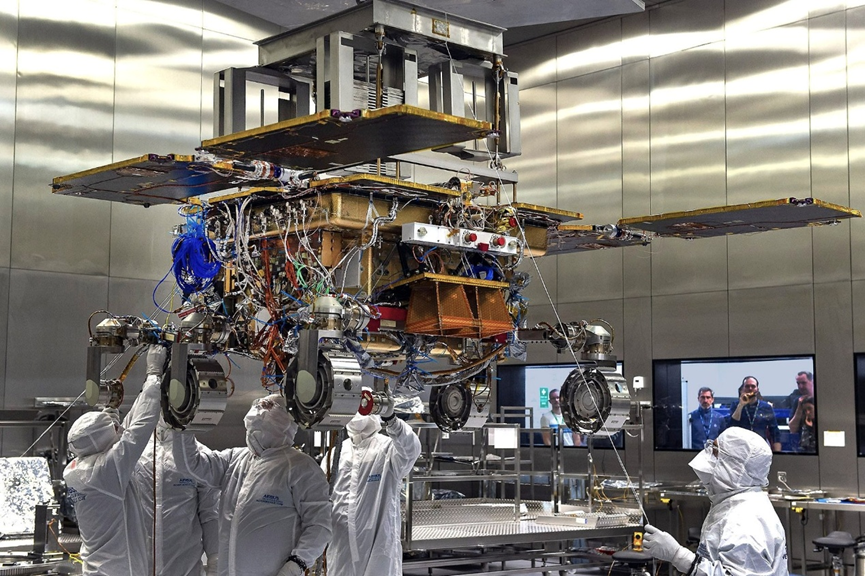
Integrazione del modello di volo del rover Rosalind (per cortesia dell’ESA)

Integrazione del modello di volo del DM russo (per cortesia dell’ESA)
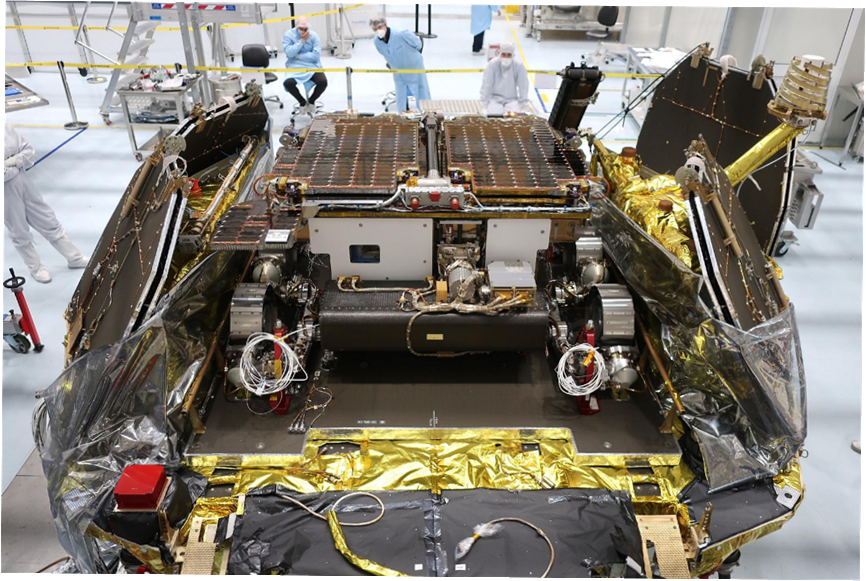
Integrazione del modello di volo del Rover Rosalind sulla piattaforma del DM russo (per cortesia dell’ESA)

Fase di chiusura del modello di volo del DM russo (per cortesia dell’ESA)

Integrazione del modello di volo del CM (per cortesia dell’ESA)

Fase di assemblaggio dei modelli di volo CM-DM russo (per cortesia dell’ESA)
L’impatto sui team ESA e industriale, causato dal “divorzio” ESA-Roscosmos, e la delusione per quanto accaduto sono stati tangibili, poiché erano state spese molte energie e risorse nella preparazione di questa missione tanto attesa. Tuttavia, la logica e le implicazioni politiche sono state condivise e ben comprese, ed i team si sono rapidamente impegnati nello studio di nuovi possibili scenari per salvare la missione e mantenere intatta la validità scientifica e tecnologica di ExoMars, anche grazie al valore e la qualità dell’hardware di volo già costruito.
Prima di tutto, è stato necessario sviluppare, in Europa, le tecnologie necessarie per colmare il vuoto creato dagli elementi originariamente forniti da Roscosmos, che sono stati restituiti agli ex-partner.
Pertanto è subito iniziata la progettazione di un nuovo lander europeo, basato sul riutilizzo di una quantità significativa dell’equipaggiamento di volo europeo che era stato costruito per il DM russo nella versione precedente della missione: il computer di bordo, l’altimetro radar doppler e il sistema di paracadute. Il resto degli equipaggiamenti è tuttora in fase di costruzione e verifica da parte dall’industria europea ed include l’aeroshell (con il suo scudo termico), la piattaforma di atterraggio, il modulo di atterraggio e il sistema di uscita del rover.
Anche il sistema di propulsione utilizzato per la decelerazione del DM durante la fase finale di discesa su Marte, le unità di riscaldamento a radioisotopi (Radioactive Heating Unit – RHU) utilizzate per riscaldare il rover durante la notte marziana ed il razzo per lanciare la missione verso Marte devono essere riconsiderati. Infatti, nella nuova versione della missione, questi elementi saranno forniti dalla NASA che, il 16 maggio 2024, si è formalmente impegnata con l’ESA con un accordo di cooperazione internazionale siglando un Memorandum d’Intesa (Memorandum of Understanding – MoU).
Inoltre è stato avviato un programma di manutenzione e ristrutturazione per l’hardware di volo esistente fornito dall’ESA, poiché sono necessari alcuni adattamenti e aggiornamenti di progettazione per far fronte alle nuove interfacce del lanciatore e alle nuove condizioni della missione.
Tutte queste modifiche e le relative attività di realizzazione hanno reso necessaria una revisione del programma di implementazione della missione, comportando inevitabilmente un aggiornamento della data di lancio, attualmente prevista nella prima finestra disponibile per ottobre 2028.
Lo spostamento della data di lancio da settembre 2022 a ottobre 2028 potrebbe, a prima vista, sembrare eccessivo, ma in realtà è più che giustificato se si considera il tempo necessario per ricostruire (ove necessario) e riqualificare lo spacecraft.
Inoltre, a seguito della nuova programmazione, si è reso necessario aggiornare anche il profilo di missione. Per chiarire meglio questo aspetto, apriamo una breve parentesi.
Il momento migliore per lanciare una missione spaziale verso Marte è di circa 2 mesi prima che il Pianeta Rosso si avvicini alla Terra: ciò accade intorno all’ Opposizione di Marte, circa ogni 26 mesi (che corrispondono al periodo sinodico).

Geometria Sole-Terra-Marte in “Congiunzione” e in “Opposizione”
[Il periodo sinodico è il tempo che impiega un oggetto, osservato dalla Terra, per ritornare nella stessa posizione del cielo, rispetto al Sole, ed è il periodo orbitale apparente (visto dalla Terra) dell’oggetto. Da sottolineare che la “rivoluzione sinodica” differisce dalla “rivoluzione siderale” perché la Terra stessa orbita attorno al Sole (N.d.R)].
La durata di un viaggio verso Marte può variare tra sei e nove mesi, ma per la missione del rover Rosalind Franklin il trasferimento dalla Terra al Pianeta Rosso durerà due anni. Questa scelta è motivata sia dalla necessità di allinearsi alla nuova programmazione sia dall’obiettivo di garantire condizioni ottimali per l’arrivo su Marte.
Il momento dell’arrivo a Marte è importante, poiché il rover deve operare sulla superficie marziana per almeno sei mesi prima dell’inizio dell’autunno nell’emisfero settentrionale, quando l’atmosfera è generalmente più polverosa e quando potrebbero verificarsi tempeste di polvere globali, durante la Global Dust Season. Per questo motivo, è meglio adottare un profilo di trasferimento più lungo (due anni nel nostro caso) e “ammartare” in un momento favorevole per portare a termine la missione del rover, piuttosto che effettuare un viaggio più breve con “ammartaggio” troppo vicino all’inizio della Global Dust Season, un evento che metterebbe a rischio la sopravvivenza del rover.
Sulla base di quanto illustrato finora, possiamo ora descrivere l’architettura del sistema della missione Rosalind Franklin rover.
Questa architettura è progettata in modo strutturato e prevede una chiara suddivisione dei compiti tra i vari elementi coinvolti: ogni elemento dovrà svolgere un ruolo specifico ed integrato per garantire il successo della missione.
Lo spacecraft include il Carrier Module (CM), progettato per trasportare a Marte un grande modulo di discesa il Descent Module (DM) del peso di circa 1250 kg. All’interno del DM verrà ospitato il rover Rosalind di circa 300 kg.
Lo spacecraft verrà lanciato nell’ottobre 2028 e, seguendo una traiettoria di trasferimento di tipo T3, raggiungerà Marte nell’ottobre 2030, dopo la conclusione della Global Dust Season.
Durante la fase di crociera, il CM fornirà propulsione, energia elettrica e garantirà le telecomunicazioni con il centro di controllo della missione.
A differenza di ExoMars 2016, il CM concluderà la sua missione dopo aver rilasciato il DM poco prima dell’arrivo su Marte.
È importante sottolineare che la missione prevede per il DM un ingresso balistico, simile a quello della missione del 2016, il che permette di fare affidamento sul design e sul patrimonio tecnologico di quest’ultima.
Infatti il DM è stato progettato per affrontare con successo la fase di Entry, Descend and Landing (EDL, Ingresso, Discesa e ammartaggio) caratterizzata dai cosiddetti “cinque minuti di terrore”.
Durante questa fase, che prevede un rapido surriscaldamento (dovuto all’interazione con l’atmosfera marziana), la decelerazione (grazie al sistema di paracadute) e l’ammartaggio controllato, il DM eseguirà autonomamente diverse manovre di alta complessità. Ogni manovra, quindi, dovrà essere eseguita con precisione per garantire il successo della missione. La sequenza di EDL è illustrata nella figura che segue.
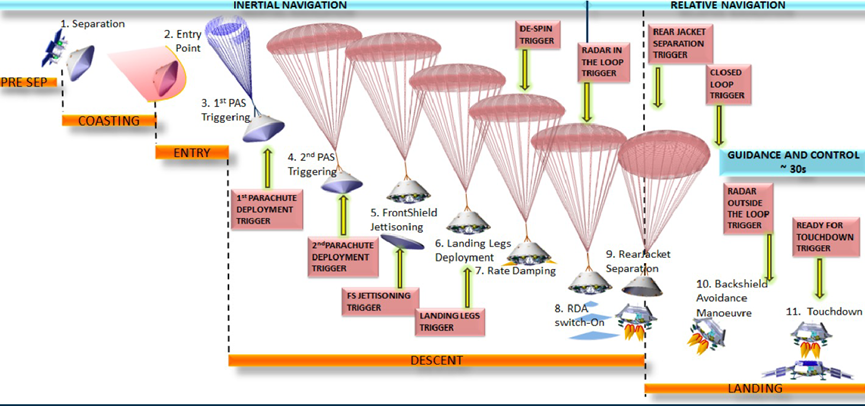
Fase di Entry, Descend and Landing del DM (per cortesia dell’ESA)
La piattaforma di atterraggio (Landing Platform, LP) è integrata nel DM e svolge un ruolo fondamentale nella protezione del rover durante il viaggio interplanetario e la fase di atterraggio su Marte.
Dopo l’atterraggio, la LP fornirà un supporto temporaneo, garantendo l’alimentazione elettrica necessaria prima che il rover sia completamente operativo.
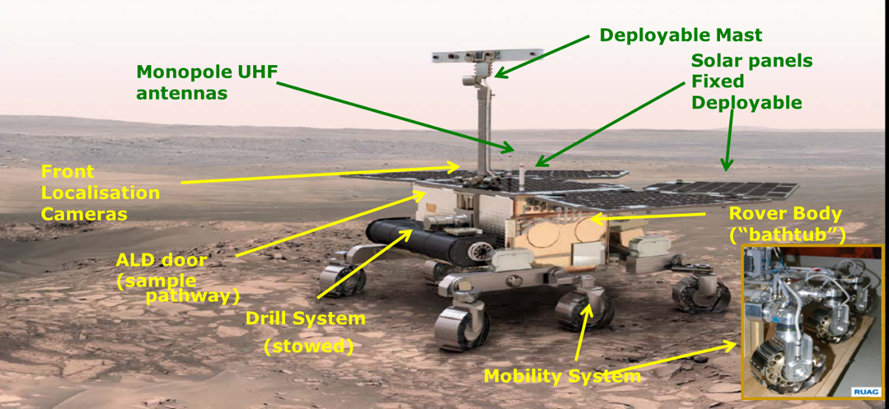
Configurazione del rover Rosalind Franklin (per cortesia dell’ESA)
Successivamente, il rover dispiegherà i suoi pannelli solari (di circa 2.5 m²), per iniziare a generare energia elettrica, ed eseguirà una serie di controlli e test di sistema per garantire che tutte le sue strumentazioni e funzioni siano operative. Questo processo include la verifica dei sistemi di comunicazione, la calibrazione degli strumenti scientifici e il monitoraggio delle condizioni ambientali.
Dopo aver completato questi controlli, il rover sarà pronto ad uscire dalla LP e a muoversi sulla superficie di Marte, grazie ad un sistema di mobilità composto da tre carrelli indipendenti, ciascuno dotato di due ruote, attuatori esterni ed elettronica di guida.
Una volta operativo sulla superficie di Marte, il rover Rosalind avrà il compito di:
- Muoversi sulla superficie di Marte con una autonomia di diversi chilometri;
- Caratterizzare l’ambiente superficiale di Marte;
- Acquisire campioni dal suolo/sottosuolo fino a 2 m di profondità (tramite il Drill);
- Preparare, distribuire ed analizzare automaticamente i campioni acquisiti dal (sotto)suolo marziano, per studiare le proprietà e cercare segni di vita presente e/o passata.
Il rover Rosalind sarà il primo veicolo in grado di combinare la capacità di muoversi sulla superficie con quella di accedere al sottosuolo.
Il carico utile scientifico del rover ha una massa di circa 25 kg e consiste in una suite completa di strumenti analitici dedicati all’esobiologia e alla geologia: il Pasteur Payload.
L’area destinata all’elaborazione e all’analisi dei campioni, la cosiddetta Ultra Clean Zone (UCZ), sarà mantenuta in condizioni altamente controllate per garantire l’integrità scientifica dei dati raccolti.

Ruota flessibile del rover Rosalind (per cortesia dell’ESA)
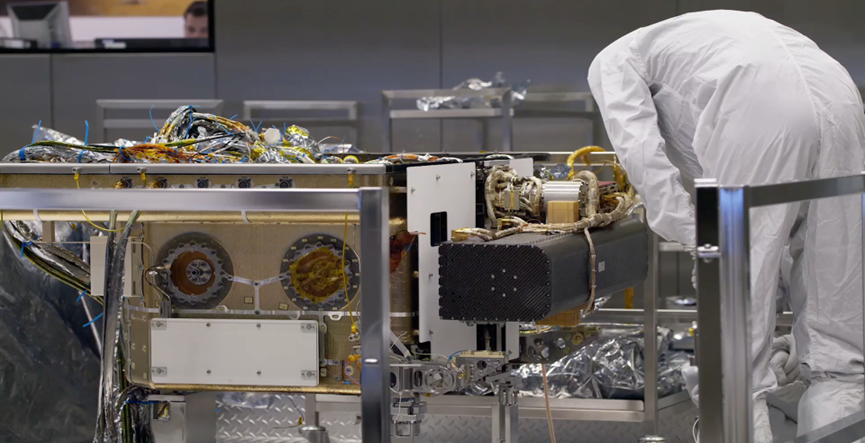
Modello di volo del Drill del rover Rosalind (per cortesia dell’ESA)

Modello di volo dell’Analytical Laboratory Drawer (ALD) del rover Rosalind (per cortesia dell’ESA)
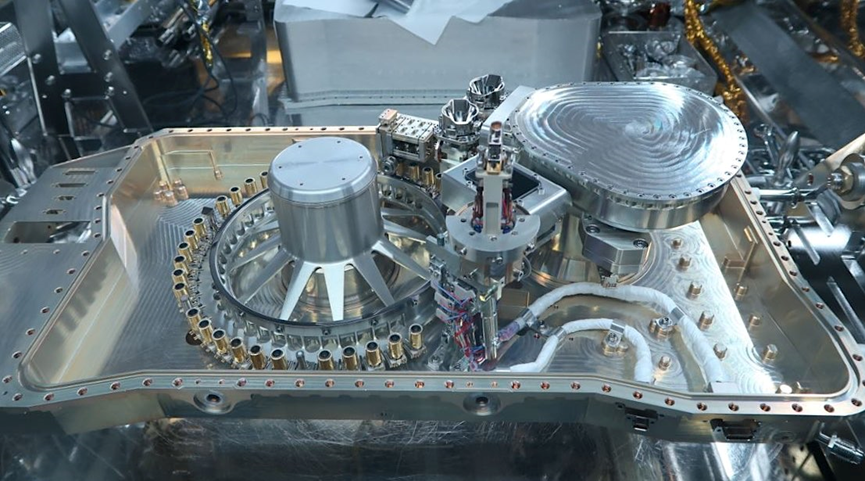
Ultra Clean Zone nel modello di volo dell’ALD (per cortesia dell’ESA)
Il Pasteur Payload include:
- Il Sistema di Telecamere Panoramiche (PanCam), dotato di due telecamere grandangolari (WAC) e una telecamera ad alta risoluzione (HRC), che consente la mappatura digitale del terreno e la creazione di immagini dei campioni raccolti dal Drill;
- Il Radar a Penetrazione Sottile (WISDOM), per analizzare la stratigrafia del sottosuolo fino a una profondità di 5 metri con una risoluzione di circa 2 cm, permettendo la costruzione di mappe dettagliate del sottosuolo;
- Lo Spettrometro a Infrarossi da Trivellazione (Ma_Miss), un dispositivo miniaturizzato integrato nel Drill, utilizzato per analizzare le immagini della parete del foro durante la trivellazione;
- Il Close-Up Imager a Prossimità (CLUPI), progettato per l’analisi ravvicinata delle rocce superficiali;
- MicrOmega IR,per esaminare in dettaglio gli assemblaggi mineralogici per determinare la loro origine geologica, la struttura e la composizione;
- Lo Spettrometro Laser Raman, che fornirà informazioni geologiche e mineralogiche su processi ignei, metamorfici e sedimentari, con particolare attenzione ai processi geologici legati all’acqua;
- Il Mars Organic Molecule Analyser (MOMA), uno strumento progettato per identificare molecole organiche nei campioni prelevati con il Drill. Fornito dalla NASA, rappresenta il componente più grande del rover ed è in grado di rilevare un’ampia varietà di molecole organiche.
[MOMA ha sostituito UREY, un altro strumento della NASA originariamente selezionato per la missione. UREY era specificamente progettato per individuare molecole a base nucleica e amminoacidi, risultando quindi altamente specializzato. Tuttavia, poiché non sappiamo quali tipi di molecole possano essere state utilizzate da eventuali microrganismi marziani, la scelta di sostituire UREY con MOMA si è rivelata una decisione strategica e prudente (N.d.R.)].
Fino all’ammartaggio, le operazioni dello spacecraft saranno gestite dall’ESOC a Darmstadt (Germania), che si occuperà della navigazione e del controllo del veicolo spaziale. Una volta sulla superficie di Marte, le operazioni del rover Rosalind Franklin saranno gestite dal Rover Operations Control Centre (ROCC) di Torino. Questo passaggio è fondamentale, poiché il ROCC avrà il compito di monitorare e controllare le operazioni quotidiane del rover, garantendone il corretto funzionamento e l’esecuzione della missione.
I dati scientifici raccolti dal rover, una volta trasmessi al ROCC, saranno analizzati da team di ricercatori partecipanti alla missione. Questo processo di analisi è fondamentale per ottenere informazioni preziose sulla superficie marziana e per rispondere alle domande scientifiche che la missione si propone di affrontare. I dati saranno poi archiviati presso l’ESAC (European Space Astronomy Centre) a Villanueva de la Canada (Madrid, Spagna) dove saranno resi disponibili per ulteriori studi e ricerche.
Un altro elemento chiave dell’architettura del sistema è il Trace Gas Orbiter (TGO), lanciato nel 2016 e tuttora operativo (anch’esso parte del programma ExoMars, come illustrato nell’articolo precedente). Il TGO non solo svolge un ruolo importante nella ricerca dei gas atmosferici su Marte, ed in particolare del metano, che potrebbe indicare l’esistenza di attività biologica o geologica, ma fungerà anche da nodo di telecomunicazione per il rover Rosalind, garantendo le telecomunicazioni tra il rover e i centri di controllo missione sulla Terra, per trasmettere i dati raccolti durante le analisi condotte direttamente sul posto dal Pasteur Payload.
Con le sue riserve di carburante, il TGO è in grado di operare ancora per oltre tre decenni, e costituisce un asset prezioso per le future missioni. Attualmente, il TGO sta già trasmettendo dati da altre missioni sulla superficie marziana, come Curiosity e Perseverance (della NASA) ed in futuro supporterà anche il programma Mars Sample Return, evidenziando così la sua importanza nel panorama delle esplorazioni marziane.
Dal punto di vista industriale la missione Rosalind Franklin rover coinvolge la Thales Alenia Space di Torino (come capofila industriale e responsabile del DM), l’Airbus Defence and Space di Stevenage (responsabile del rover Rosalind), OHB di Brema (responsabile del CM). Un consorzio guidato da Thales Alenia Space in Francia fornisce il sistema di paracadute. Inoltre, sono coinvolte circa altre 60 industrie e la maggior parte dei paesi membri dell’ESA, con l’Italia come partecipante principale del programma. Il Rover Operation Control Center che controllerà la missione di superficie è stato costruito ad ALTEC Torino.
La missione del rover Rosalind Franklin rappresenta un passo significativo nella nostra ricerca di risposte sulla vita su Marte. L’analisi dei campioni prelevati dal Drill e l’uso del Pasteur Payload per identificare molecole organiche saranno fondamentali per comprendere se Marte abbia mai ospitato forme di vita.
Il lavoro del team ESA e dell’industria europea, in collaborazione con la NASA, sarà determinante per affrontare le sfide legate a questa ambiziosa missione. L’attesa per il lancio nel 2028 e l’arrivo a Marte nel 2030 è palpabile, e tutti gli scienziati sono ansiosi di vedere i risultati di questa esplorazione. La possibilità di scoprire tracce di vita su Marte non solo amplierebbe la nostra comprensione dell’universo, ma potrebbe anche avere implicazioni profonde per la nostra stessa esistenza.
Tiferò anch’io per il successo di questa missione, e mi auguro che lo facciate anche voi, nella speranza che ci porti più vicino a rispondere a una delle domande fondamentali della scienza: la vita esiste o è mai esistita su Marte ?
Il nostro viaggio, per ora, si ferma qui. Mi auguro che questa tappa vi abbia interessato ed affascinato.
Nella prossima tappa descriverò la missione Rosetta, un’altra pietra miliare dell’esplorazione spaziale robotica. Lanciata nel marzo 2004, dopo un viaggio di oltre 10 anni, Rosetta è riuscita ad orbitare e depositare il lander Philae sulla cometa 67P/Churyumov-Gerasimenko, raggiungendo un traguardo incredibile che ha aperto una finestra sul passato del nostro sistema solare.
Le informazioni raccolte da Rosetta non solo ci hanno aiutato a comprendere meglio la formazione dei corpi celesti, ma hanno anche fornito spunti sull’origine dell’acqua e della vita sulla Terra.
Per ulteriori informazioni sul programma ExoMars visitare:
www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars (in Inglese)

Giacinto Gianfiglio, gia’ Mission and System Manager del programma ExoMars dell’Agenzia Spaziale Europea (ESA)